基于Python+PyQt5实现串口数据采集和显示
本节我们将会通过pyqt5实现串口数据采集和实时通信,涉及到的技术栈包括:python、pyqt5。
一、环境搭建
1.1 python 3.x安装
直接从官网下载安装包:index of /ftp/python/;
这里我下载的包为https://www.python.org/ftp/python/3.9.6/python-3.9.6-amd64.exe,安装版本:python 3.9.6 。
双击开始安装的时候,一定要把下面的 add path勾上 (表示添加到环境变量,这样cmd也能使用了),其他一路next安装完成。默认会安装一键式工具pip。
pip工具镜像源配置。配置方法如下:
- 在
cmd窗口下执行echo %homepath%获取用户home目录,并在该目录下创建pip目录; - 在
pip目录下创建pip.ini文件。记住,后缀必须是.ini格式。并在该文件中写入如下内容;
内容如下:
[global] index-url = https://pypi.tuna.tsinghua.edu.cn/simple [install] trusted-host = pypi.tuna.tsinghua.edu.cn
1.2 安装pycharm
官方网站:http://www.jetbrains.com/pycharm/,提供以下安装版本:
professional:专业版(收费,网上一大堆破解方法)community:社区版(免费,我用的这个),下载版本为pycharm-community-2023.3.4.exe;
1.3 pyqt5安装
使用pip工具安装pyqt5工具,执行:
pip install pyqt5
如果慢,用国内源:
pip install pyqt5 -i https://pypi.tuna.tsinghua.edu.cn/simple
使用pip工具安装pyqt5-tools工具,执行:
pip install pyqt5-tools
如果慢,用国内源:
pip install pyqt5-tools -i https://pypi.tuna.tsinghua.edu.cn/simple
工具安装完成后的路径在e:\program files\python\lib\site-packages。
pyqt5主要有三个部分:
qtcore: 包含了核心的非gui的功能。主要和时间、文件与文件夹、各种数据、模型、流、urls、mime类文件、进程与线程一起使用;qtgui: 包含了窗口系统、事件处理、2d图像、基本绘画、字体和文字类;qtwidgets: 包含了一些创建桌面的ui元素和控件;
1.4 环境配置
pycharm是开发python程序主流常用的ide。为方便调用qt designer实现界面开发和编译相应完成,可以在pycharm配置qt designer和pyuic、pyrcc。
其中qt designer是qt 设计师,pyuics是把ui界面转换成py文件,pyrcc是资源系统转换。
打开pycharm, 新建一个项目,项目名称为serial_port。
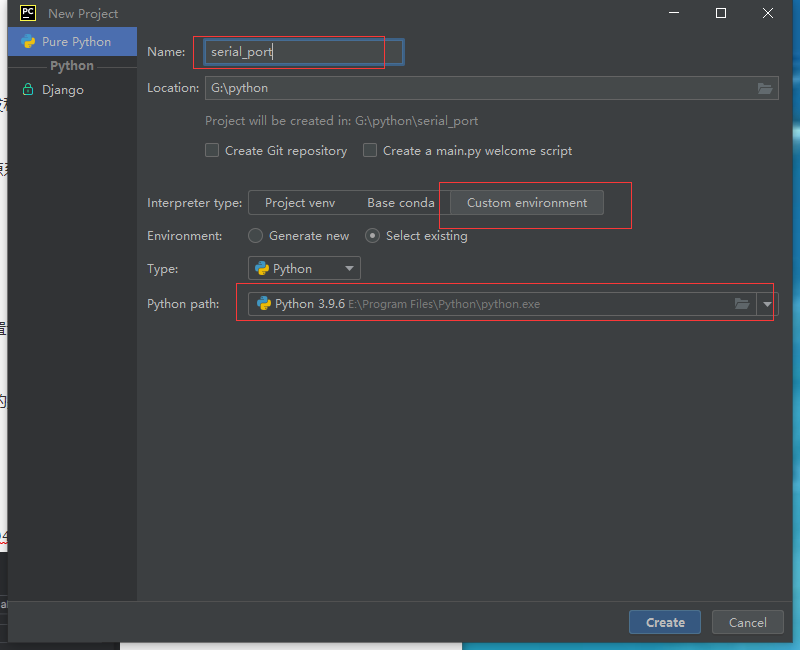
这里python path选择我们之前安装的python 3.9.6的路径:e:\program files\python\python.exe。
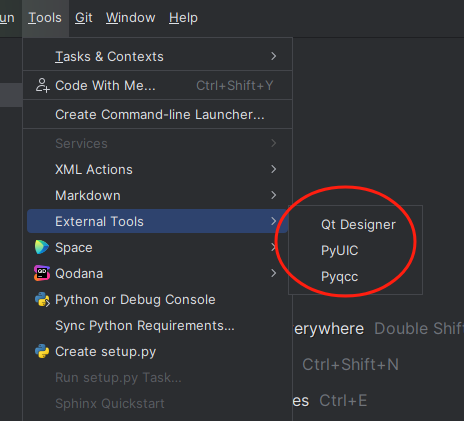
1.4.1 配置qt designer
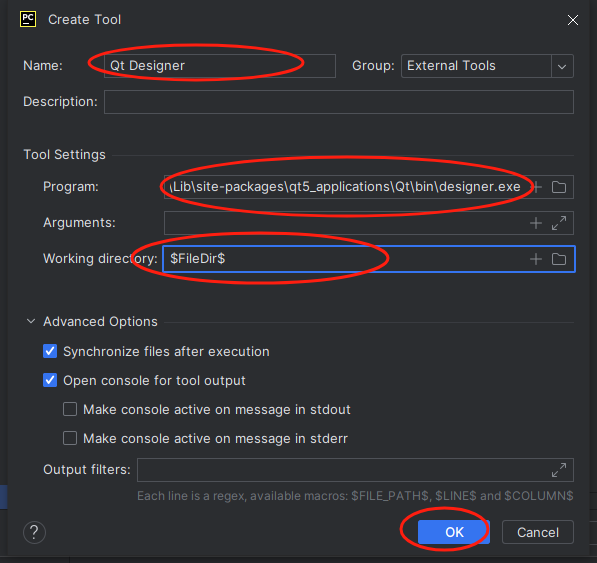
菜单file ->settings -> tools -> external tools -> +号,进行添加。 参数配置说明:
- name:填入qt designer,实际可以任意取值;
- program:designer.exe程序绝对路径。根据实际安装路径填写,这里我配置的是e:\program files\python\lib\site-packages\qt5_applications\qt\bin\designer.exe;
- working directory: 填入$filedir$,固定取值;
具体如下:
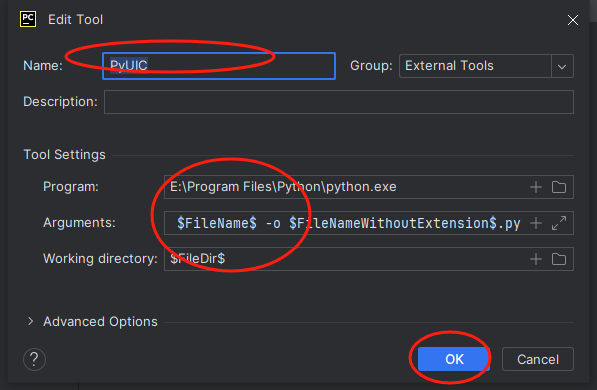
1.4.2 配置pyuic
该工具是用于将qt designer工具开发完成的.ui文件转化为.py文件。配置打开路径同qt designer,参数配置说明:
name:填入pyuic,实际可以任意取值。program:python.exe程序绝对路径,根据实际安装路径填写,这里我配置的是e:\program files\python\python.exe;arguments:-m pyqt5.uic.pyuic $filename$ -o $filenamewithoutextension$.py;working directory: 填入$filedir$,固定取值;
具体如下:
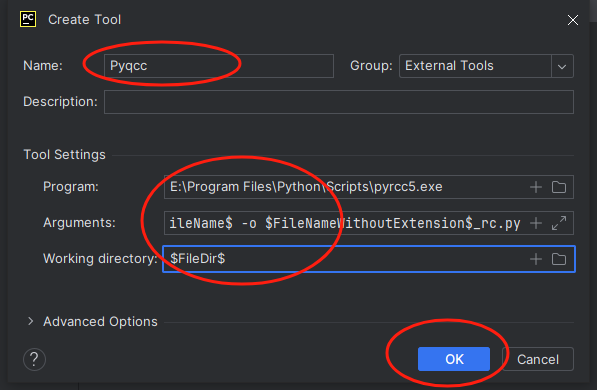
1.4.3 配置pyqcc
配置打开路径同qt designer。参数配置说明:
name:填入pyqcc,实际可以任意取值。program:这里我配置的是e:\program files\python\scripts\pyrcc5.exe;arguments:$filename$ -o $filenamewithoutextension$_rc.py;working directory: 填入$filedir$,固定取值;
具体如下:
1.5 测试
测试qt designer和pyuic、pyqcc配置是否成功。打开路径:菜单栏tools ->external tools ->qt designer/pyuic/pyqcc;
1.5.1 ui_serial_port.ui
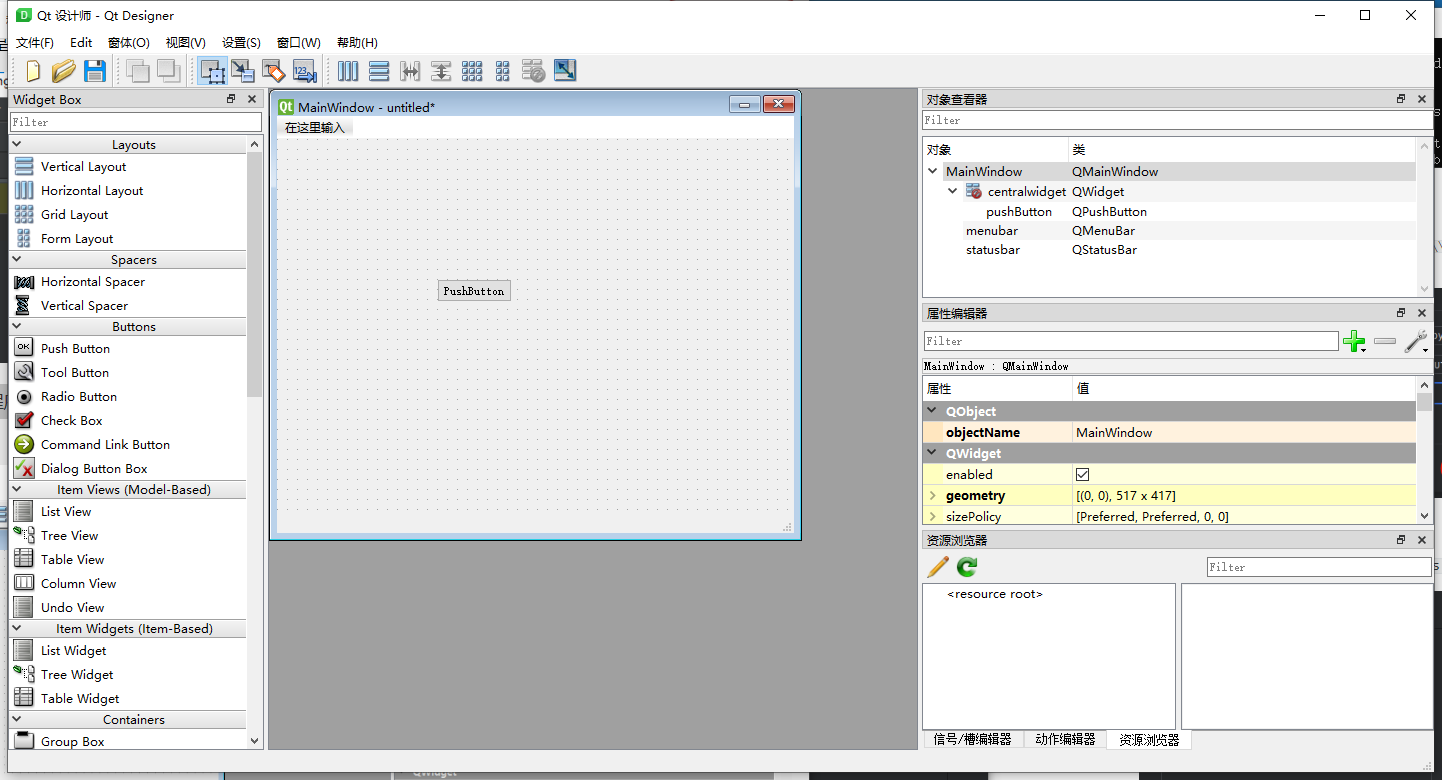
点击qt designer,打开designer程序主主界面,会弹出一个窗口,这里一般是选择main window或者widget,其中main window继承自widget,添加了一些内容,本质二者差不多。这里选择的是main window;
将左侧widget box中push button空间拖到主界面,ctrl + s保存名称ui_serial_port.ui,默认后缀就是.ui。
1.5.2 ui_serial_port.py
选中ui_serial_port.ui文件,同理点击pyuic,自动完成ui_serial_port.ui文件的转换,生成文件名为ui_serial_port.py。
1.5.3 serial_port.py
除ui界面代码,还需要有一个逻辑代码,而逻辑代码个人感觉使用类的形式来组织更加方便,也更优雅。
还记得创建ui时选择的类吗?是widget还是main window,逻辑代码类最好是继承这个这个类,即qwidget或qmainwindow。一般的代码结构如下所示:
from pyqt5.qtwidgets import qmainwindow
# 导入设计的ui界面转换成的py文件
from ui_serial_port import ui_mainwindow
class serialport(qmainwindow):
"""
串口行为
"""
def __init__(self):
# qmainwindow构造函数初始化
super().__init__()
self.ui = ui_mainwindow()
# 这个函数本身需要传递一个mainwindow类,而该类本身就继承了这个,所以可以直接传入self
self.ui.setupui(self)
1.5.4 main.py
在当前项目下,新建main.py 文件;
import sys
from serial_port import serialport
from pyqt5.qtwidgets import qapplication, qmainwindow
if __name__ == '__main__':
# 先建立一个app
app = qapplication(sys.argv)
# 初始化一个对象,调用init函数,已加载设计的ui文件
ui = serialport()
# 显示这个ui
ui.show()
# 运行界面,响应按钮等操作
sys.exit(app.exec_())
运行程序:
二、程序设计
2.1 需求
客户这里有一款惯性设备,在惯性装置的axs31接口,里面有两路数据,一路称为导航解算,一路称为原始信息。我们通过串口读取该设备的数据并在界面显示处理,同时还需要将读取到的数据保存到文本中。
实际在测试时候发现只能接收到导航解算报文,因此猜测原始信息已经被传感器内部转换为导航解算报文了。
2.1.1 导航解算报文
波特率:230400,数据位8,停止位1,无校验;
| 字节 | 意义 | 类型 | 所占字节 | 备注 |
|---|---|---|---|---|
| 1-2 | 报文头 | 2字节 | 5a 5a | |
| 3 | 工作状态 | 1字节 | 0xff等待对准 0x00码头对准 0x01海上对准 0x02牵引对准 0x03 是无阻尼 0x04是惯导阻尼 0x05 点校 0x06 综合校正 0x07 位置组合 | |
| 4 | 参数状态 | 1字节 | b8 =0手动 b8=1自动 | |
| 5-8 | 运行时间 | 4字节 | 单位0.05s | |
| 9-11 | 纬度 | 3字节 | 量纲93206.75556 | |
| 12-14 | 经度 | 3字节 | 量纲46603.37778 | |
| 15-16 | 升沉 | 2字节 | 最小量纲100m | |
| 17-18 | 东速 | 2字节 | 最小量纲100kn | |
| 19-20 | 北速 | 2字节 | 最小量纲100kn | |
| 21-22 | 垂速 | 2字节 | 最小量纲100m/s | |
| 23-25 | 姿态角1 | 3字节 | 最小量纲0.25*93206.75556 | |
| 26-28 | 姿态角2 | 3字节 | 最小量纲93206.75556 | |
| 29-31 | 姿态角3 | 3字节 | 最小量纲93206.75556 | |
| 32-34 | 姿态角速率1(纵摇角速率) | 3字节 | 93206.75556 度每秒 | |
| 35-37 | 姿态角速率2 (横摇角速率) | 3字节 | 93206.75556 度每秒 | |
| 38-40 | 姿态角速率3(航向角速率) | 3字节 | 93206.75556度每秒 | |
| 41 | 故障码 | 1字节 | b0=1 imu接收错 b1=1 测角采样错 b2=1 接收缓存错 b3=1 测角控制板错 b4=1 驱动错 b5=1 测角错 b6=1 激磁错 b7=1 转台保护错 | |
| 42-43 | imutime | 2字节 | ||
| 44-47 | 备用 | 4字节 | ||
| 48 | 应答标志 | 1字节 | 可忽略 | |
| 49 | 校验和 | 1字节 | 3-48字节累加和 |
2.1.2 原始信息报文
波特率:230400,数据位8,停止位1,无校验;
| 字节 | 意义 | 类型 | 所占字节 | 备注 |
|---|---|---|---|---|
| 1-2 | 报文头 | int | 2字节 | 5a 5a |
| 3-6 | imutime | int | 4字节 | 整型时戳 |
| 7-10 | gyrox | float | 4字节 | 直接浮点数 |
| 11-14 | gyroy | float | 4字节 | 直接浮点数 |
| 15-18 | gyroz | float | 4字节 | 直接浮点数 |
| 19-22 | accex | float | 4字节 | 直接浮点数 |
| 23-26 | accey | float | 4字节 | 直接浮点数 |
| 27-30 | accez | float | 4字节 | 直接浮点数 |
| 31-34 | 备用 | int | 4字节 | |
| 35-37 | 转台角1 | int | 3字节 | 量纲2.330168888888889*e4° |
| 38-40 | 转台角2 | int | 3字节 | 量纲2.330168888888889*e4° |
| 41-43 | gps经度 | int | 3字节 | 量纲93206.75556 |
| 44-46 | gps纬度 | int | 3字节 | 量纲46603.37778 |
| 47-48 | para4 | int | 2字节 | |
| 49-50 | para[2]/para[5] | int | 2字节 | |
| 51-52 | para[3]/para[6] | int | 2字节 | |
| 53-54 | para[7] | int | 2字节 | |
| 55-56 | para[8] | int | 2字节 | |
| 57 | comdatavalid | int | 1字节 | |
| 58 | 校验和 | int | 1字节 | 3-57和校验 |
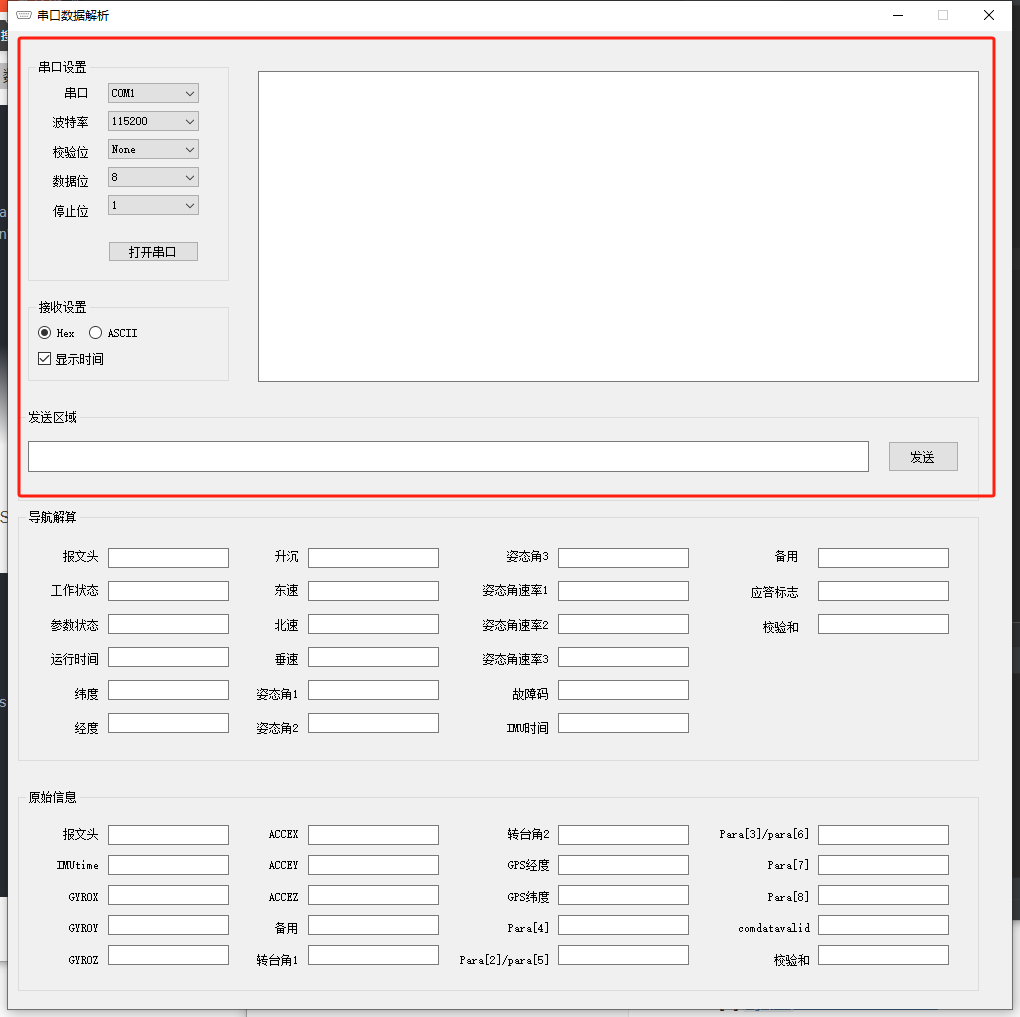
2.2 界面设计
首先,我们设计一个简单的用户界面,包括:
- 串口配置区域:【串口】、【波特率】、【数据位】、【停止位】的设置,以及一个按钮用于开始打开和关闭串口;
- 接收设置区域:用于设置接收和发送的数据格式,支持
16进制以及ascii两种格式;这里为了简单起见,程序中发送/接收采用一样的数据格式;16进制:例如:5a 5a 02 03 5a;ascii格式:例如:ddr v1.12 52218f4949 cym 23/07/0;
- 数据发送区域:由一个文本框和一个发送按钮组成;
- 数据接收区域:由一个文本域组成;
- 如果接收到的数据时导航解算或者原始信息报文,则将解析后的数据显示在导航结算和原始信息区域;
界面效果如下(参考网上串口助手工具);
三、程序实现
我们将界面原型划分成了五个区域;
- 串口设置区域;
- 接收设置区域;
- 数据发送区域;
- 数据接收区域;
- 导航解算和原始信息区域;
我们针对这五个区域编写相关实现代码,其具体流程如下;
- 使用
qt designer工具按照界面原型设置窗口,主要使用到一些基础控件,比如按钮、文本框、文本域、单选框、复选框等;‘ - 针对窗体各个区域中的控件进行初始化工作;
我们将界面相关的代码均放置在serial_port.py文件中,该文件主要包含了如下功能;
- 界面初始化工作;
- 打开串口;
- 接收数据;
- 发送数据。
3.1 初始化工作
3.1.1 初始化串口设置区域
串口设置区域主要由【串口】、【波特率】、【校验位】、【数据位】、【停止位】下拉列表以及【打开串口】按钮组成。
首先需要初始化【串口】、【波特率】、【校验位】、【数据位】、【停止位】下拉列表;
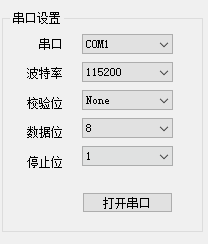
- 串口:下拉列表加载系统当前可用的串口;
- 波特率:下拉列表设置常见的波特率,比如
1200、2400、9600、4800,9600,19200,384000,57600,115200,460800,921600,230400,1500000等; - 校验位:下拉列表设置校验位为
none、odd、even、mark、space; - 数据位:下拉列表设置为
5、6、7、8; - 停止位:下拉列表设置为
1、2;
设置【打开串口】按钮点击事件对应的槽函数为self.open_serial_connection,当点击【打开串口】按钮时将会执行该函数;
代码位于serial_port.py中__init_serial_setting__,具体如下;
def __init_serial_setting__(self):
"""
初始化串口设置相关控件默认参数
设置下拉列表自动补全 https://blog.csdn.net/xuleisdjn/article/details/51434118
:return:
"""
# 加载可用串口
self.ui.cbx_com.seteditable(false)
self.ui.cbx_com.setmaxvisibleitems(10) # 设置最大显示下列项 超过要使用滚动条拖拉
self.ui.cbx_com.setinsertpolicy(qcombobox.insertaftercurrent) # 设置插入方式\
port_list = list(serial.tools.list_ports.comports()) # 获取当前的所有串口,得到一个列表
for port in port_list:
self.ui.cbx_com.additem(port.device)
# 初始化波特率列表
self.ui.cbx_baud_rate.seteditable(false)
self.ui.cbx_baud_rate.setmaxvisibleitems(10) # 设置最大显示下列项 超过要使用滚动条拖拉
self.ui.cbx_baud_rate.setinsertpolicy(qcombobox.insertaftercurrent) # 设置插入方式
for baud_rate in [1200, 2400, 4800, 9600, 19200, 384000, 57600, 115200, 460800, 921600, 230400, 1500000]:
self.ui.cbx_baud_rate.additem(str(baud_rate), baud_rate)
# 设置默认值
self.ui.cbx_baud_rate.setcurrentindex(7)
# 初始化校验位列表
self.ui.cbx_parity_bit.seteditable(false)
self.ui.cbx_parity_bit.setmaxvisibleitems(10) # 设置最大显示下列项 超过要使用滚动条拖拉
self.ui.cbx_parity_bit.setinsertpolicy(qcombobox.insertaftercurrent) # 设置插入方式
for (key, value) in {'none': serial.parity_none, 'odd': serial.parity_odd,
'even': serial.parity_even, 'mark': serial.parity_mark,
'space': serial.parity_space}.items():
self.ui.cbx_parity_bit.additem(key, value)
# 设置默认值
self.ui.cbx_parity_bit.setcurrentindex(0)
# 初始化数据位列表
self.ui.cbx_data_bit.seteditable(false)
self.ui.cbx_data_bit.setmaxvisibleitems(10) # 设置最大显示下列项 超过要使用滚动条拖拉
self.ui.cbx_data_bit.setinsertpolicy(qcombobox.insertaftercurrent) # 设置插入方式
for data_bit in [serial.fivebits, serial.sixbits, serial.sevenbits, serial.eightbits]:
self.ui.cbx_data_bit.additem(str(data_bit), data_bit)
# 设置默认值
self.ui.cbx_data_bit.setcurrentindex(3)
# 初始化停止位列表
self.ui.cbx_stop_bit.seteditable(false)
self.ui.cbx_stop_bit.setmaxvisibleitems(10) # 设置最大显示下列项 超过要使用滚动条拖拉
self.ui.cbx_stop_bit.setinsertpolicy(qcombobox.insertaftercurrent) # 设置插入方式
for data_bit in [serial.stopbits_one, serial.stopbits_two]:
self.ui.cbx_stop_bit.additem(str(data_bit), data_bit)
# 设置默认值
self.ui.cbx_stop_bit.setcurrentindex(0)
# 设置点击打开串口按钮对应的槽函数
self.ui.btx_start.clicked.connect(self.open_serial_connection)
3.1.2 初始化串口接收区域
串口接收区域主要由【hex】、【ascii】单选框以及【显示时间】复选框组成;
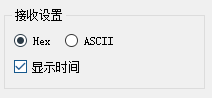
设置发送/接收的数据格式,支持hex和ascii,hex和ascii是互斥的,默认选中hex,这里我们设置:
- 【
hex】单选框点击事件对应的槽函数为self.rbn_data_format_hex_clicked,当点击【hex】单选框时将会执行该函数,在该函数内会记录当前选中的是hex; - 【
ascii】单选框点击事件对应的槽函数为self.rbn_data_format_ascii_clicked,当点击【ascii】单选框时将会执行该函数,在该函数内出记录当前选中的是ascii;
【显示时间】复选框用于设置串口接收到数据时,是否在接收区域输出当前时间;
代码位于serial_port.py中__init_recv_setting__,具体如下;
def __init_recv_setting__(self): """ 接收设置初始化 :return: """ self.ui.rbn_data_format_hex.clicked.connect(self.rbn_data_format_hex_clicked) self.ui.rbn_data_format_ascii.clicked.connect(self.rbn_data_format_ascii_clicked)
其中rbn_data_format_hex_clicked函数;
def rbn_data_format_hex_clicked(self): """ 接收数据格式发生变化 :return: """ if self.ui.rbn_data_format_hex.ischecked(): self.ui.rbn_data_format_ascii.setchecked(false) if self.serial_thread: self.serial_thread.date_format = 'hex'
其中rbn_data_format_ascii_clicked函数;
def rbn_data_format_ascii_clicked(self): """ 接收数据格式发生变化 :return: """ if self.ui.rbn_data_format_ascii.ischecked(): self.ui.rbn_data_format_hex.setchecked(false) if self.serial_thread: self.serial_thread.date_format = 'ascii'
3.1.3 初始化串口数据接收区域
串口数据接收区域由一个【文本域控件】组成,用于存放串口接收到的数据,数据长度默认最长为5000字符,超过5000字符自动清空;
这里初始化【文本域控件】为只读,并且串口接收到数据时,自动将滚动条移动至【文本域控件】的最低端;
代码位于serial_port.py中__init_recv_setting__,具体如下;
def __init_recv_data_viewer__(self): """ 初始化串口数据接收区域 :return: """ self.ui.txt_recv_data_viewer.setreadonly(true) self.ui.txt_recv_data_viewer.textchanged.connect( lambda: self.ui.txt_recv_data_viewer.movecursor(qtextcursor.end))
3.1.4 初始化串口数据发送区域
串口数据接收区域由一个【文本输入框】和一个【发送】按钮组成,文本输入框用于输入要发送的内容,点击发送按钮,会将文本输入框的内容通过当前打开的串口发送出去;

代码位于serial_port.py中__init_send_data_viewer__,具体如下;
def __init_send_data_viewer__(self): """ 初始化串口数据发送区域 :return: """ self.ui.btn_send.clicked.connect(self.send_serial_data)
设置【发送】按钮点击事件对应的槽函数为self.send_serial_data,当点击【发送】按钮时将会执行该函数进行串口数据的发送。
3.1.5 初始化报文解析区域
报文解析区域主要由两部分组成;
- 导航结算区域:该部分主要由【报文头】、【工作状态】、【参数状态】、【运行时间】等文本输入框组成,其与导航解算报文字段一一对应;
- 原始信息区域:该部分主要由【报文头】、【
imutime】、【gyrox】、【gyroz】等文本输入框组成,其与原始信息报文字段一一对应;
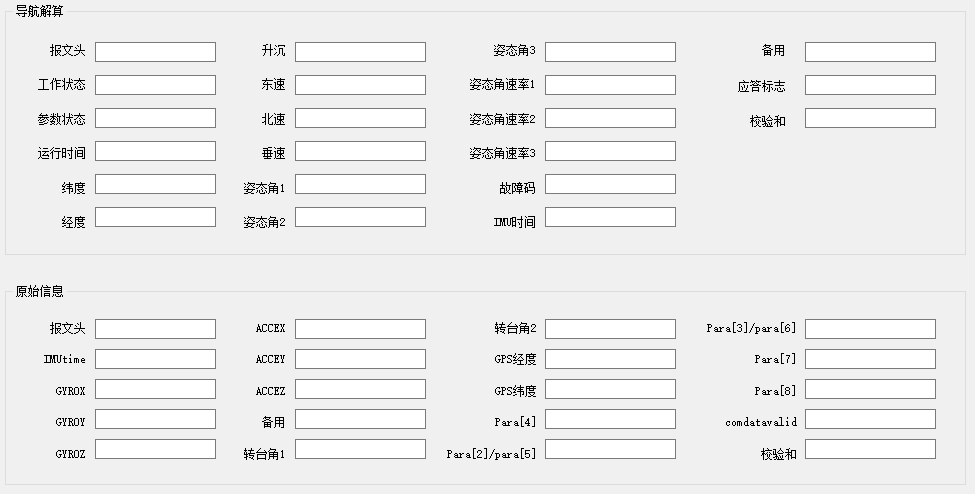
代码位于serial_port.py中__init_package_setting__,具体如下;
def __init_package_setting__(self): self.ui.let_nav_header.setreadonly(true) self.ui.let_nav_work_state.setreadonly(true) self.ui.let_nav_param_state.setreadonly(true) self.ui.let_nav_run_time.setreadonly(true) self.ui.let_nav_latitude.setreadonly(true) self.ui.let_nav_longitude.setreadonly(true) self.ui.let_nav_heave.setreadonly(true) self.ui.let_nav_east_speed.setreadonly(true) self.ui.let_nav_north_speed.setreadonly(true) self.ui.let_nav_vertical_speed.setreadonly(true) self.ui.let_nav_attitude_angle1.setreadonly(true) self.ui.let_nav_attitude_angle2.setreadonly(true) self.ui.let_nav_attitude_angle3.setreadonly(true) self.ui.let_nav_attitude_velocity1.setreadonly(true) self.ui.let_nav_attitude_velocity2.setreadonly(true) self.ui.let_nav_attitude_velocity3.setreadonly(true) self.ui.let_nav_fault_code.setreadonly(true) self.ui.let_nav_imu_time.setreadonly(true) self.ui.let_nav_reserved.setreadonly(true) self.ui.let_nav_response_flag.setreadonly(true) self.ui.let_nav_check_sum.setreadonly(true) self.ui.let_raw_header.setreadonly(true) self.ui.let_raw__imu_time.setreadonly(true) self.ui.let_raw_gyrox.setreadonly(true) self.ui.let_raw_gyroy.setreadonly(true) self.ui.let_raw_gyroz.setreadonly(true) self.ui.let_raw_accex.setreadonly(true) self.ui.let_raw_accey.setreadonly(true) self.ui.let_raw_accez.setreadonly(true) self.ui.let_raw_reserved.setreadonly(true) self.ui.let_raw_turntable_angle1.setreadonly(true) self.ui.let_raw_turntable_angle2.setreadonly(true) self.ui.let_raw_longitude.setreadonly(true) self.ui.let_raw_latitude.setreadonly(true) self.ui.let_raw_para4.setreadonly(true) self.ui.let_raw_para2_5.setreadonly(true) self.ui.let_raw_para3_6.setreadonly(true) self.ui.let_raw_para7.setreadonly(true) self.ui.let_raw_para8.setreadonly(true) self.ui.let_raw_comdata_valid.setreadonly(true) self.ui.let_raw_check_sum.setreadonly(true)
这里我们仅仅是将上述这些控件设置为只读状态。
3.2 打开串口
根据硬件设备参数在串口设置区域进行配置【串口】、【波特率】、【校验位】、【数据位】、【停止位】,配置完成后,当点击【打开串口】按钮,将会执行open_serial_connection函数;
在open_serial_connection函数内主要会进行如下工作;
- 获取串口设置区域配置的参数,并对参数进行校验,具体是由
__validate_setting__函数完成; - 调用
serialthread创建串口线程,并将串口设置区域配置参数传递给线程; - 设置串口线程接收到数据时对应的槽函数为
handle_data_received,即串口接收到数据时会执行handle_data_received函数; - 设置串口线程发生异常时对应的槽函数为
handler_serial_error,即串口线程发生异常时,会将错误信息发送给主线程,主线程接收到错误信息,将会在界面显示;
核心代码如下:
def open_serial_connection(self):
"""
打开串口
:return:
"""
if not self.serial_thread or not self.serial_thread.isrunning():
# 参数校验
if not self.__validate_setting__():
return
# 建立一个串口
self.serial_thread = serialthread(self.ui.cbx_com.currenttext(),
self.ui.cbx_baud_rate.currentdata(),
self.ui.cbx_data_bit.currentdata(),
self.ui.cbx_parity_bit.currentdata(),
self.ui.cbx_stop_bit.currentdata(),
'hex' if self.ui.rbn_data_format_hex.ischecked() else 'ascii')
self.serial_thread.data_received.connect(self.handle_data_received)
self.serial_thread.serial_error.connect(self.handler_serial_error)
self.serial_thread.start()
self.ui.btx_start.settext("关闭串口")
else:
self.serial_thread.stop()
# 打开串口操作
self.ui.btx_start.settext("打开串口")
3.2.1 __validate_setting__
__validate_setting__函数主要就是校验【串口】、【波特率】、【校验位】、【数据位】、【停止位】下拉列表是否已经配置,如果未配置将会弹出警告提示信息;
def __validate_setting__(self): """ 校验串口设置参数 :return: """ # 参数校验 if self.ui.cbx_com.currentindex() == -1: qmessagebox.warning(self, "warning", "请选择串口!") return false if self.ui.cbx_baud_rate.currentindex() == -1: qmessagebox.warning(self, "warning", "请选择波特率!") return false if self.ui.cbx_parity_bit.currentindex() == -1: qmessagebox.warning(self, "warning", "请选择校验位!") return false if self.ui.cbx_data_bit.currentindex() == -1: qmessagebox.warning(self, "warning", "请选择数据位!") return false if self.ui.cbx_data_bit.currentindex() == -1: qmessagebox.warning(self, "warning", "请选择停止位!") return false return true
3.2.2 serialthread
serialthread类的实现位于serial_thread.py文件中,这块我们后面单独接收。
3.2.3 handle_data_received
当串口接收到数据时会执行handle_data_received函数,这块我们后面单独接收。
3.2.4 handler_serial_error
串口线程发生异常时,会将错误信息发送给主线程,主线程接收到错误信息,将会在界面显示;具体实现函数为handler_serial_error;
def handler_serial_error(self, error): """ 串口接收线程异常 :param error: :return: """ qmessagebox.critical(self, '错误', error)
3.3 接收数据
上面我们提到,当串口线程接收到数据时,会将数据通过信号与槽机制传递给主线程,将会由主线程handle_data_received函数进行处理;
在handle_data_received函数内主要会进行如下工作;
- 获取当前时间;
- 串口数据接收区域【文本域控件】内容超过
5000个字符将会清空; - 如果配置了显示当前时间,将会在接收到的数据前面 插入当前时间,并将数据追加到串口数据接收区域【文本域控件】中;
- 如果串口接收区域配置的数据格式为
hex,将会对接收到的报文信息进行解析;- 解析由
packageparse类完成,解析类会根据报文数据长度、报文头、以及校验和等参数判定当前报文格式为导航结算还是原始信息; - 如果为导航结算报文,保存报文到
nav_data.csv,同时将报文解析到的字段一一填入界面导航结算区域对应的控件中; - 如果为原始信息报文,保存报文到
raw_data.csv,同时将报文解析到的字段一一填入界面原始信息区域对应的控件中;
- 解析由
- 移除已经解析的报文,截取未解析的报文,重复报文解析的流程,直至报文内容不满足导航结算、原始信息报文格式;
handle_data_received代码如下:
def handle_data_received(self, data):
"""
接收数据
:param data:接收到的数据
:return:
"""
# 获取时间
current_time = qdatetime.currentdatetime().tostring("yyyy-mm-dd hh:mm:ss")
# 超过5000字符清空
if len(self.ui.txt_recv_data_viewer.toplaintext()) > 5000:
self.ui.txt_recv_data_viewer.clear()
# 更新显示区域中的数据
if self.ui.cbx_show_time.ischecked():
self.ui.txt_recv_data_viewer.insertplaintext(f"[{current_time}] {data}")
else:
self.ui.txt_recv_data_viewer.insertplaintext(f"[{data}")
# 必须是hex格式
if self.ui.rbn_data_format_ascii.ischecked():
return
# 如果报文最后两位是换行符,则移除
data = data.replace('0d 0a', '')
data = bytes.fromhex(data.replace(' ', ''))
# 解析data
while data is not none:
package_parse = packageparse(data)
data_format = package_parse.get_data_format()
if data_format == packageparse.type.nal_sol:
# 解析数据
dict_msg = package_parse.get_nav_sol()
# 写入当前时间,并保存到文件
dict_msg["current_time"] = current_time
save_csv('nav_data.csv', dict_msg)
# 界面显示
self.ui.let_nav_header.settext(dict_msg["header"])
self.ui.let_nav_work_state.settext(dict_msg["work_state"])
self.ui.let_nav_param_state.settext(dict_msg["param_state"])
self.ui.let_nav_run_time.settext(str(dict_msg["run_time"]))
self.ui.let_nav_latitude.settext(str(dict_msg["latitude"]))
self.ui.let_nav_longitude.settext(str(dict_msg["longitude"]))
self.ui.let_nav_heave.settext(str(dict_msg["heave"]))
self.ui.let_nav_east_speed.settext(str(dict_msg["east_speed"]))
self.ui.let_nav_north_speed.settext(str(dict_msg["north_speed"]))
self.ui.let_nav_vertical_speed.settext(str(dict_msg["vertical_speed"]))
self.ui.let_nav_attitude_angle1.settext(str(dict_msg["attitude_angle1"]))
self.ui.let_nav_attitude_angle2.settext(str(dict_msg["attitude_angle2"]))
self.ui.let_nav_attitude_angle3.settext(str(dict_msg["attitude_angle3"]))
self.ui.let_nav_attitude_velocity1.settext(str(dict_msg["attitude_velocity1"]))
self.ui.let_nav_attitude_velocity2.settext(str(dict_msg["attitude_velocity2"]))
self.ui.let_nav_attitude_velocity3.settext(str(dict_msg["attitude_velocity3"]))
self.ui.let_nav_fault_code.settext(dict_msg["fault_code"])
self.ui.let_nav_imu_time.settext(dict_msg["imu_time"])
self.ui.let_nav_reserved.settext(dict_msg["reserved"])
self.ui.let_nav_response_flag.settext(dict_msg["response_flag"])
self.ui.let_nav_check_sum.settext(dict_msg["check_sum"])
if data_format == packageparse.type.raw:
# 解析数据
data = package_parse.get_raw()
# 写入当前时间,并保存到文件
data["current_time"] = current_time
save_csv('raw_data.csv', data)
# 界面显示
self.ui.let_raw_header.settext(dict_msg["header"])
self.ui.let_raw__imu_time.settext(dict_msg["imu_time"])
self.ui.let_raw_gyrox.settext(dict_msg["gyrox"])
self.ui.let_raw_gyroy.settext(dict_msg["gyroy"])
self.ui.let_raw_gyroz.settext(dict_msg["gyroz"])
self.ui.let_raw_accex.settext(dict_msg["accex"])
self.ui.let_raw_accey.settext(dict_msg["accey"])
self.ui.let_raw_accez.settext(dict_msg["accez"])
self.ui.let_raw_reserved.settext(dict_msg["reserved"])
self.ui.let_raw_turntable_angle1.settext(dict_msg["turntable_angle1"])
self.ui.let_raw_turntable_angle2.settext(dict_msg["turntable_angle2"])
self.ui.let_raw_longitude.settext(dict_msg["longitude"])
self.ui.let_raw_latitude.settext(dict_msg["latitude"])
self.ui.let_raw_para4.settext(dict_msg["para4"])
self.ui.let_raw_para2_5.settext(dict_msg["para2_5"])
self.ui.let_raw_para3_6.settext(dict_msg["para3_6"])
self.ui.let_raw_para7.settext(dict_msg["para7"])
self.ui.let_raw_para8.settext(dict_msg["para8"])
self.ui.let_raw_comdata_valid.settext(dict_msg["comdata_valid"])
self.ui.let_raw_check_sum.settext(dict_msg["check_sum"])
# 一次收到若干个数据包
if data_format != packageparse.type.unknown and len(data) > data_format.value:
data = data[data_format.value:]
else:
data = none
文件保存函数save_csv:
def save_csv(file_name, dict: {}):
"""
保存到csv文件
:param file_name:文件名
:param dict: 数据,字典格式
:return:
"""
file_exists = os.path.exists(file_name)
# save data to csv file
with open(file_name, 'a', newline='') as csvfile:
writer = csv.writer(csvfile)
# 如果文件不存在,则写入列名
if not file_exists:
writer.writerow(dict.keys())
# 写入数据
writer.writerow(dict.values())
3.4 报文解析
报文解析是由packageparse类实现的,代码位于package_parse.py,在该类内部主要实现了一下功能;
判断当前报文格式是导航结算还是原始信息,由get_data_format函数实现;实现导航结算报文的解析,由get_nav_sol函数实现;实现原始信息报文的解析,由get_raw函数实现;
3.4.1 get_data_format
这里判断报文格式的方法很简单;
- 首先就是长度判定,如果是导航结算报文,长度至少为49个字符;如果是原始信息报文,长度至少是58个字符;
- 接着判断报文前两个字节是否为
0x5a 0x5a; - 然后判定第58个字节是否为
3~57个字节的累加和,如果满足条件就是原始信息报文; - 最后判定第49个字节是否为
3~48个字节的累加和,如果满足条件就是导航结算报文;
具体代码如下:
def validate_nal_sol(self): """ 校验和 导航结算:第49个字节为3-48字节累加和 """ # 取出第3到第48字节 selected_bytes = self.__byte_array[2:48] # 计算累加和并只保留低两位数字 checksum = sum(selected_bytes) & 0xff return checksum == self.__byte_array[48] def validate_raw(self): """ 校验和 原始信息:第58个字节为3-57字节累加和 """ # 取出第3到第48字节 selected_bytes = self.__byte_array[2:57] # 计算累加和并只保留低两位数字 checksum = sum(selected_bytes) & 0xff return checksum == self.__byte_array[57] def get_data_format(self): """ 返回数据类型:在惯性装置的axs31接口,里面有两路数据,一路称为导航解算,一路称为原始数 :return: 0: 导航解算 1:原始信息 2:非法数据 """ # 原始信息报文 if (len(self.__byte_array) >= 58 and self.__byte_array[0] == 0x5a and self.__byte_array[1] == 0x5a and self.validate_raw()): return packageparse.type.raw # 导航解算的报文内容 if (len(self.__byte_array) >= 49 and self.__byte_array[0] == 0x5a and self.__byte_array[1] == 0x5a and self.validate_nal_sol()): return packageparse.type.nal_sol return packageparse.type.unknown
3.4.2 get_nav_sol
如果报文格式是导航结算,那么调用该方法实现导航结算报文的解析,在函数内部根据字段单位、量纲对原始字节进行了转换;
def translate(hex_array: [], unit=none):
"""
将字节数组转换为16进制字符串 [0x0a,0x04]-> 0x0a 0x04
:param hex_array: 字节数组
:param unit 量纲
:return:
"""
if unit is not none:
# 将字节数组按照小端格式转换为数字
num = int.from_bytes(hex_array, byteorder='little')
return num / unit
return ' '.join(f'0x{val:02x}' for val in hex_array)
def get_nav_sol(self):
"""
获取导航解算数据
:return:
"""
if self.get_data_format() != packageparse.type.nal_sol:
print("数据格式错误,非导航解算报文!")
return none
message_dict = {}
# 解析报文头
message_dict['header'] = translate(self.__byte_array[0:2])
# 解析工作状态
message_dict['work_state'] = translate(self.__byte_array[2:3])
# 解析参数状态
message_dict['param_state'] = translate(self.__byte_array[3:4])
# 解析运行时间
message_dict['run_time'] = translate(self.__byte_array[4:8], 20)
# 解析纬度
message_dict['latitude'] = translate(self.__byte_array[8:11], 93206.75556)
# 解析经度
message_dict['longitude'] = translate(self.__byte_array[11:14], 46603.37778)
# 解析升沉
message_dict['heave'] = translate(self.__byte_array[14:16], 100)
# 解析东速
message_dict['east_speed'] = translate(self.__byte_array[16:18], 100)
# 解析北速
message_dict['north_speed'] = translate(self.__byte_array[18:20], 100)
# 解析垂速
message_dict['vertical_speed'] = translate(self.__byte_array[20:22], 100)
# 解析姿态角1
message_dict['attitude_angle1'] = translate(self.__byte_array[22:25], 0.25 * 93206.75556)
# 解析姿态角2
message_dict['attitude_angle2'] = translate(self.__byte_array[25:28], 93206.75556)
# 解析姿态角3
message_dict['attitude_angle3'] = translate(self.__byte_array[28:31], 93206.75556)
# 姿态角速率1
message_dict['attitude_velocity1'] = translate(self.__byte_array[31:34], 93206.75556)
# 姿态角速率2
message_dict['attitude_velocity2'] = translate(self.__byte_array[34:37], 93206.75556)
# 姿态角速率3
message_dict['attitude_velocity3'] = translate(self.__byte_array[37:40], 93206.75556)
# 故障码
message_dict['fault_code'] = translate(self.__byte_array[40:41])
# imu时间
message_dict['imu_time'] = translate(self.__byte_array[41:43])
# 备用
message_dict['reserved'] = translate(self.__byte_array[43:47])
# 应答标志
message_dict['response_flag'] = translate(self.__byte_array[47:48])
# 校验和
message_dict['check_sum'] = translate(self.__byte_array[48:49])
return message_dict
3.4.3 get_raw
如果报文格式是原始信息,那么调用该方法实现原始信息报文的解析;
def get_raw(self):
"""
获取原始信息报文
:return:
"""
if self.get_data_format() != packageparse.type.raw:
print("数据格式错误,非原始信息报文!")
return none
message_dict = {}
# 解析报文头
message_dict['header'] = translate(self.__byte_array[0:2])
# imutime
message_dict['imu_time'] = translate(self.__byte_array[2:6])
# gyrox
message_dict['gyrox'] = translate(self.__byte_array[6:10])
# gyroy
message_dict['gyroy'] = translate(self.__byte_array[10:14])
# gyroz
message_dict['gyroz'] = translate(self.__byte_array[14:18])
# accex
message_dict['accex'] = translate(self.__byte_array[18:22])
# accey
message_dict['accey'] = translate(self.__byte_array[22:26])
# accez
message_dict['accez'] = translate(self.__byte_array[26:30])
# 备用
message_dict['reserved'] = translate(self.__byte_array[30:34])
# 转台角1
message_dict['turntable_angle1'] = translate(self.__byte_array[34:37])
# 转台角2
message_dict['turntable_angle2'] = translate(self.__byte_array[37:40])
# gps经度
message_dict['longitude'] = translate(self.__byte_array[40:43])
# gps纬度
message_dict['latitude'] = translate(self.__byte_array[43:46])
# para[4](电磁/牵引时为航向)
message_dict['para4'] = translate(self.__byte_array[46:48])
# para[2]/para[5]
message_dict['para2_5'] = translate(self.__byte_array[48:50])
# para[3]/para[6]
message_dict['para3_6'] = translate(self.__byte_array[50:52])
# para[7]
message_dict['para7'] = translate(self.__byte_array[52:54])
# para[8]
message_dict['para8'] = translate(self.__byte_array[54:56])
# comdatavalid
message_dict['comdata_valid'] = translate(self.__byte_array[56:57])
# 校验和
message_dict['check_sum'] = translate(self.__byte_array[57:58])
return message_dict
3.5 发送数据
当用户在串口数据接收区域的【文本输入框】录入内容,点击【发送】按钮时,会调用send_serial_data方法:
def send_serial_data(self, data: str): """ 发送数据 :return: """ if not self.serial_thread or not self.serial_thread.isrunning(): qmessagebox.warning(self, "warning", "请先打开串口!") return data = self.ui.let_send_data_viewer.text() if data != "": self.serial_thread.send_data(data) self.ui.let_send_data_viewer.clear()
函数内部首先校验串口是否已经打开,如果串口已经打开并且【文本输入框】输入了内容,将调用串口线程的send_data方法来进行数据发送。
3.6 串口线程
pyqt已经为我们提供了串口控件,控件名称为qtserialport,使用方法比较简单,主要是两个模块:qserialport, qserialportinfo,但是这个控件提供的能力有限。
这里我们使用另一个串口包pyserial来实现:
pip install pyserial -i https://pypi.tuna.tsinghua.edu.cn/simple
为了实现串口数据的读取和发送,我们创建了一个继承自qthread的serialthread类;
from pyqt5.qtcore import qthread,pyqtsignal
import serial
class serialthread(qthread):
"""
创建一个继承自qthread的serialthread类,实现串口数据的读取/发送
"""
# 用于发送串口数据接收信号
data_received = pyqtsignal(str)
# 串口打开/接收异常
serial_error = pyqtsignal(str)
.......
3.6.1 初始化
在首次点击【打开串口】按钮时会创建serialthread实例,即调用串口线程初始化方法;
def __init__(self, port, baud_rate, data_bits, parity_bits, stop_bits, data_format):
"""
初始化
:param port: 串口号
:param baud_rate: 波特率
:param data_bits: 数据位
:param stop_bits: 停止位
:param parity_bits: 奇偶校验位
"""
super().__init__()
self.port = port
self.baud_rate = baud_rate
self.data_bits = data_bits
self.stop_bits = stop_bits
self.parity_bits = parity_bits
# 串口已经运行标志位
self.running = false
# 串口
self.serial = none
# 数据格式
self.__date_format = data_format
# 发送开启追加换行
self.__auto_line = true
@property
def date_format(self):
"""
#把一个getter方法变成属性
:return:
"""
return self.__date_format
@date_format.setter
def date_format(self, value):
"""
# 负责把一个setter方法变成属性赋值
:param value:
:return:
"""
if not isinstance(value, str):
raise valueerror('date_format must be an str')
if value not in ['hex', 'ascii']:
raise valueerror('date_format must in [hex,ascii]')
self.__date_format = value
在这段代码中,主要就是保存构造函数传递过来的参数,比如串口号、波特率等。
3.6.2 线程运行
串口线程初始化完成后,调用start方法,将会执行run函数;
def run(self):
"""
打开串口
:return:
"""
# 串口已经运行
if self.running:
return
try:
# 建立一个串口
with serial.serial(port=self.port,
baudrate=self.baud_rate,
parity=self.parity_bits,
bytesize=self.data_bits,
stopbits=self.stop_bits,
timeout=2) as self.serial:
self.running = true
while self.running:
data = self.__read_data__()
if data:
self.data_received.emit(data)
except exception as e:
print("打开串口时失败:", e)
self.serial_error.emit("打开串口时失败!")
在函数内部我们实际上就是调用了pyserial提供的serial类去实现串口的打开,并在while循环中,调用__read_data__获取串口发送过来的数据,如果接受到数据将串口数据通过信号与槽机制推送给主线程。
3.6.3 接受数据
串口数据的读取是由__read_data__函数完成的,在函数内部我们调用self.serial.readline()依次读取一行的数据,这里读取到的是字节数组,我们根据我们串口接收区域设置的数据格式来进行解析;
def __read_data__(self):
"""
按行接收数据
:return:
"""
if self.serial is none or not self.serial.isopen():
return
try:
# 读取串口数据 例如:b'ddr v1.12 52218f4949 cym 23/07/0'
byte_array = self.serial.readline()
if len(byte_array) == 0:
return none
# ascii显示
if self.__date_format == 'ascii':
# 串口接收到的字符串为b'abc',要转化成unicode字符串才能输出到窗口中去
data_str = byte_array.decode('utf-8')
else:
# 串口接收到的字符串为b'zz\x02\x03z',要转换成16进制字符串显示
data_str = ' '.join(format(x, '02x') for x in byte_array)
if self.__auto_line:
data_str += '\r\n'
return data_str
except exception as e:
print("接收数据异常:", e)
self.serial_error.emit("接收数据异常!")
3.6.4 发送数据
当用户在串口数据接收区域的【文本输入框】录入内容,点击【发送】按钮时,最终调用的就是串口线程的send_data方法;我们根据我们串口接收区域设置的数据格式处理将要发送的数据,然后调用self.serial.write实现串口数据的发送;
def send_data(self, data: str):
"""
发送数据
:return:
"""
if not self.running:
self.serial_error.emit("请先打开串口!")
return
# hex发送 比如:5a 5a 02 03 5a -> b'zz\x02\x03z'
if self.__date_format == 'hex':
data_str = data.strip()
send_list = []
while data_str != '':
try:
num = int(data_str[0:2], 16)
except valueerror:
self.serial_error.emit('请输入十六进制数据,以空格分开!')
return
data_str = data_str[2:].strip()
send_list.append(num)
if self.__auto_line:
send_list.append(0x0d)
send_list.append(0x0a)
byte_array = bytes(send_list)
else:
if self.__auto_line:
data += '\r\n'
# ascii发送 比如:'abc' -> b'abc'
byte_array = data.encode('utf-8')
try:
self.serial.write(byte_array)
except exception as e:
print("发送失败", e)
self.serial_error.emit('发送失败!')
以上就是基于python+pyqt5实现串口数据采集和显示的详细内容,更多关于python pyqt5数据采集和显示的资料请关注代码网其它相关文章!